

טילי שיוט איראניים
במה טכנולוגית, 25 בנובמבר 2025

אריה אבירם[1]
טילי שיוט (Cruise Missiles – CM) הם כלי טיס לא מאוישים, לרוב מוּנעים באמצעות מנועי סילון, שמסוגלים להוביל ראש קרבי (רש"ק) כבד יחסית לטווחים ארוכים (עשרות, מאות ואף אלפי קילומטרים) ולפוצץ אותו במטרה. במתקפת הטילים הראשונה של איראן על ישראל ב-14 באפריל 2024 שוגרו, בין השאר, עשרות טילי שיוט לעבר ישראל, שיורטו כולם. הסקירה מתמקדת בארסנל טילי השיוט של איראן.
טילי שיוט – כרטיס ביקור
טילי שיוט הם פלטפורמות אוויריות לא מאוישות הדומות למטוסי קרב קטנים. היות שהרש"ק שלהם גדול וכבד וטווח הפעולה שלהם ארוך בדרך כלל, אפשר להגיד שטילי השיוט הם "אחים גדולים" של הטילים המשוטטים (כטב"מים מתפוצצים). את טילי השיוט ניתן לשגר מהקרקע, מהים (מספינות) או מהאוויר (ממטוסים). מבחינה מבצעית פרופיל המשימה שלהם דומה לזה של הטילים המשוטטים, והוא כולל את השלבים הבאים:
- הכנה לשיגור – כוללת בדיקות שמישות והטענת נתוני משימה.
- שיגור. שיגור ממשגר קרקעי מתבצע ברוב המקרים באמצעות מנוע רקטי מאיץ (booster).
- מעבר להנעה סילונית.
- ניווט ושיוט לכיוון המטרה שהוגדרה.
- גילוי וזיהוי המטרה.
- תקיפת המטרה ופיצוץ הרש"ק.
המרכיבים העיקריים של טיל שיוט הם (ראו תמונה 1):
- פלטפורמה אווירית, שחלק מהמשטחים האווירודינמיים שלה מקופלים לפעמים לפני השיגור.
- מערכת הנעה הכוללת מנוע סילון מסוג turbo-fan, turbo-jet או ram-jet.
- מערכת דלק.
- מערכת ניווט.
- מחשב מרכזי – המשמש כבקר הטיל ולפעמים גם כטייס אוטומטי.
- מערכת אספקת חשמל.
- ראש ביות (לא תמיד).
- מערכת תקשורת (לא תמיד).
ביות טילי השיוט למטרה מתבצע לרוב באמצעות אחת משיטות ההנחיה הבאות:
- ניווט אינרציאלי – על ידי שימוש בחיישנים שונים (ג'יירו ומדי תאוצה).
- ניווט לווייני – מבוסס על אחת או יותר ממערכות הניווט הלווייני GNSS – למשל GPS, GLONASS או שילוב של מספר מערכות ניווט לווייני. לרוב תעבוד מערכת הניווט הלווייני בשילוב עם מערכת הניווט האינרציאלית.
- שימוש במכ"ם לניווט ולביות סופי – בשיטה זו משווים את התכסית למפות באמצעות המכ"ם– TERCOM – Terrain Contour Matching.
- שימוש בחיישן אופטי (מצלמה) לניווט ולביות סופי – השיטה מאפשרת השוואה של תמונת המצלמה למפות – DISMAC – Digital Scene Matching Area Correlation.
- שימוש בראש ביות מכ"מי לביות סופי.
- שימוש בראש ביות אלקטרו-אופטי לביות סופי.
טיל השיוט האמריקאי TOMAHAWK BLOCK III (ראו תמונות 3-1) עושה שימוש ביכולות אלו.
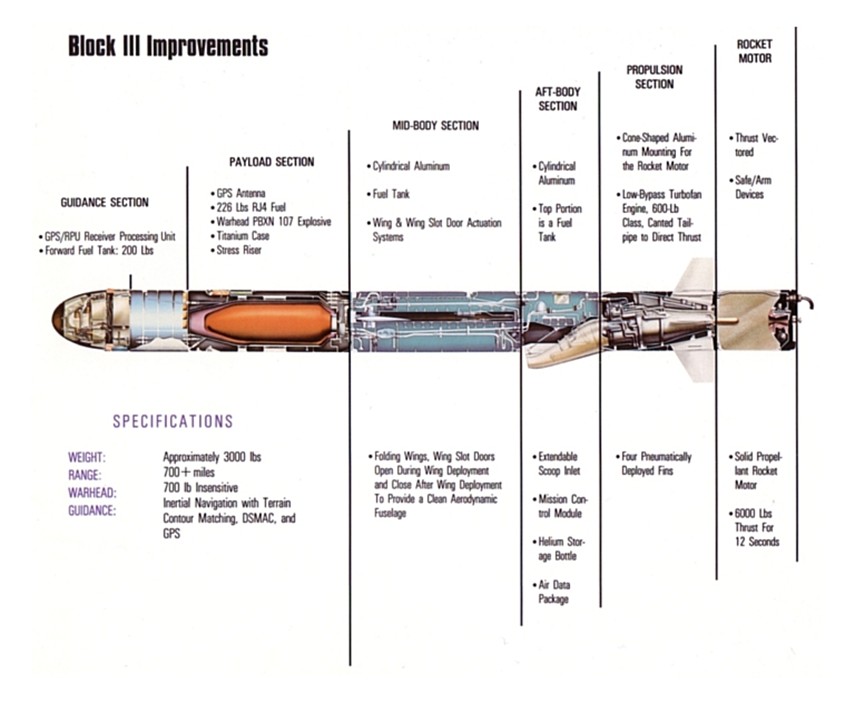
תמונה 1 – מבנה טיל שיוט אמריקאי TOMAHAWK Block III | מקור: ausairpower.net
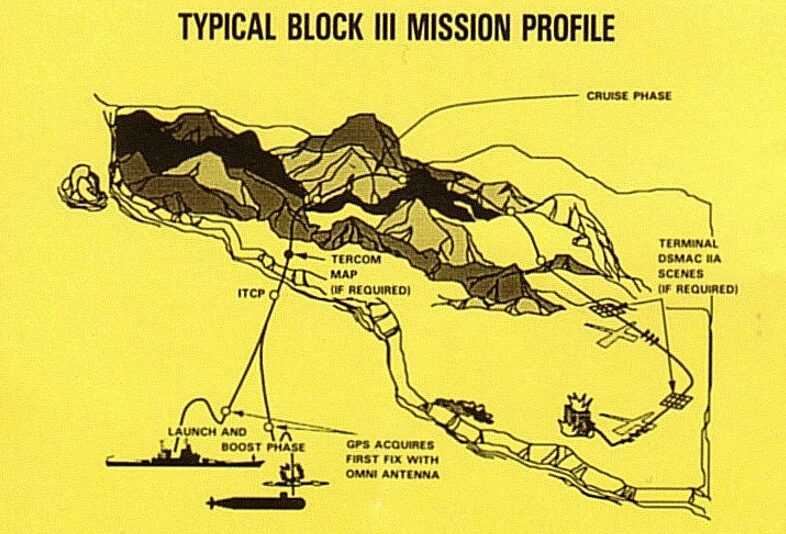
תמונה 2 – פרופיל המשימה של טיל שיוט TOMAHAWK Block III| מקור: ausairpower.net
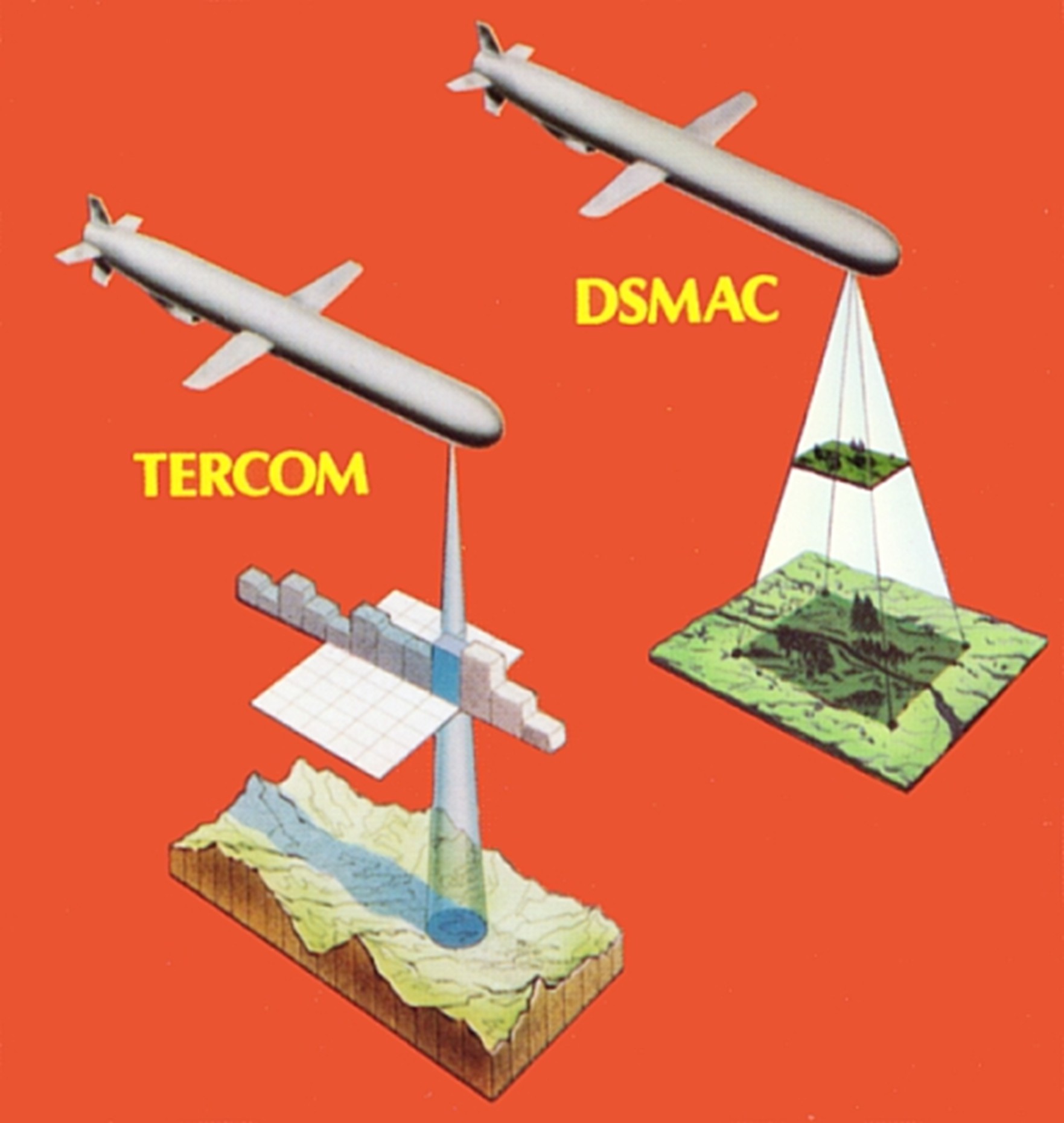
תמונה 3 – ניווט מכ"מי (TERCOM) ואופטי (DISMAC) | מקור: ausairpower.net
טילי שיוט איראניים
האיראנים, שחיל האוויר שלהם חלש יחסית ומבוסס על מטוסי קרב מיושנים שנרכשו בימי שלטון השאה, זיהו את הפוטנציאל הגלום בטילי השיוט ויזמו מאמץ שמטרתו הייתה פיתוח קבוצה שלמה של טילי שיוט. בתחילת הדרך (סוף שנות ה-80 ותחילת שנות ה-90 של המאה הקודמת) רכשו האיראנים מסין טילי שיוט נגד ספינות מסוג SILKWORM (HY-2), C-704 ו-C-802. בהמשך הם העתיקו את הטילים הסיניים ופיתחו על בסיסם דגמים משלהם: NOOR המבוסס על C-802 ו-NASR-1 המבוסס על C-704. לטילים אלה נוספו מאוחר יותר דגמים משופרים: RAAD, GHADER ו-GHADIR.
בשנת 2006, במהלך מלחמת לבנון השנייה, חזבאללה שיגר טיל מסוג C-802 (כנראה דגם NOOR, שהוא העתק איראני של ה-C-802 הסיני, שהוא עצמו פותח בהשראת התכן של טיל ה-EXOCET הצרפתי ושל ה-HARPOON האמריקאי) לעבר ספינת חיל הים 'חנית'. הספינה נפגעה ובתקרית נהרגו ארבעה חיילים מצוות הספינה.
בשנת 2001, במטרה להתקדם בפיתוח טילי שיוט עם ביצועים משופרים, רכשו האיראנים באוקראינה, בצורה בלתי חוקית, מספר טילי שיוט סובייטיים מסוג Kh-55. זהו טיל שיוט אסטרטגי בעל טווח של יותר מ-2,500 ק"מ, ובמקור הוא מסוגל לשאת גם רש"ק גרעיני.
האיראנים העתיקו את הטיל Kh-55 תחת השם SOUMAR (2015) עם ביצועי טווח דומים, ולאחר מכן, פיתחו על בסיסו את טיל השיוט HOVEIZEH, בעל טווח קצר יותר של 1,350 ק"מ. לוח 1 להלן משווה את טילי השיוט האיראניים שפותחו על בסיס ה-Kh-55.
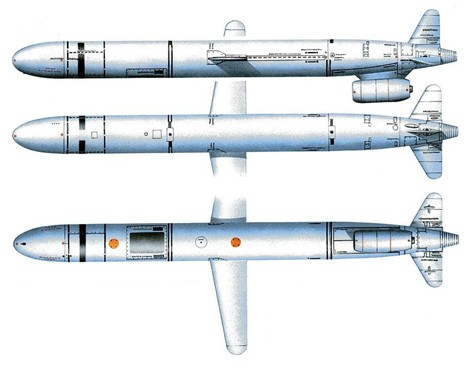
תמונה 4 – טיל שיוט רוסי Kh-55 | מקור: Illustrative photo from open sources
טיל שיוט SOUMAR
ה-SOUMAR נחשף בשנת 2015, זהו טיל שיוט איראני שפותח על בסיס הטיל הרוסי Kh-55. הוא משוגר ממשגר קרקעי באמצעות מאיץ דלק מוצק ומוּנע כנראה באמצעות מנוע טורבו-ג'ט Turbojet)). סביר להניח שמדובר במנוע איראני TOLOU-4 שהוא העתק של המנוע הצרפתיMICROTURBO 60-2. לפי סברה אחרת הטיל מונע באמצעות מנוע Turbofan, שהוא העתק של המנוע הרוסי המקורי של ה-Kh-55. הטיל מגיע, לפי הצהרת האיראנים, לטווחים של 3,000-2,000 ק"מ. ייתכן שהוא משתמש בהנחיית TERCOM כמו ה-Kh-55 הרוסי, אך אין לכך הוכחה או עדות צילומית. משקל הרש"ק מוערך סביב 410 ק"ג, כמו משקל הרש"ק בטיל הרוסי Kh-55.

תמונה 5 – טיל שיוט SOUMAR | מקור: presstv
טיל שיוט איראני HOVEIZEH
הטיל HOVEIZE הוא גרסה משופרת של ה-SOUMAR, והטווח שלו 1,350 ק"מ. המנוע הסילוני של ה-HOVEIZEH הוא כנראה מסוג Turbojet, ומשקל הרש"ק כנראה גם סביב 400 ק"ג.

תמונה 6 – טיל שיוט HOVEYZEH | מקור: Fars
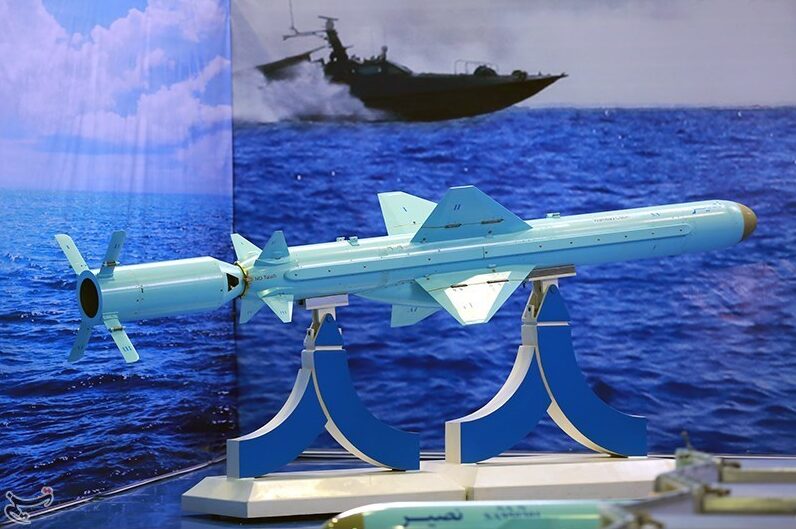
טיל שיוט ABU MAHDI
ABU MAHDII הוא טיל שיוט איראני המהווה גרסה ימית משופרת של ה-SOUMAR. הטווח שלו קצר יותר – רק 1,000 ק"מ.
תמונה 7 – טיל שיוט ABU MAHDI | מקור: csis.org
טיל שיוט PAVEH
PAVEH הוא טיל שיוט איראני חדש יחסית, שנחשף רק בפברואר 2023. פיתוחו נועד לאפשר תקיפה של מטרות קרקעיות בטווחים ארוכים תוך עקיפת הצורך בהשגת עליונות אווירית, הטווח שלו 1,650 ק"מ. בשלב ניווט הביניים הוא משתמש במערכת הנחיה מבוססת ניווט אינרציאלי שנעזרת במערכת ניווט לוויינית. נראה שבשלב הסופי של תקיפת המטרה הטיל מונחה באמצעות מערכת חדישה כגון TERCOM או DUSMAC, אף כי אין לכך עדות מצולמת. משטחי ההיגוי והכנפיים מקופלים, כנראה על מנת לאפשר שיגור של הטיל מתוך קניסטר (מְכָל שיגור). האיראנים טוענים ליכולת שיגור טילים אלה בנחילים תוך קיום תקשורת ותיאום מבצעי ביניהם. אין על כך תיעוד פומבי מפורט.

תמונה 8 – טיל שיוט PAVEH |מקור: armyrecognition.com
טיל שיוט YA ALI
YA ALI הוא טיל שיוט איראני המיועד לשיגור אווירי (ALCM – Air Launched Cruise Missile) שנחשף בשנת 2014, הטווח שלו 700 ק"מ. הטיל מונע באמצעות מנוע Turbojet, כנראה תוצרת איראן מסוג TOUE-4 או חדיש יותר. מנוע זה הוא העתק איראני של המנוע הצרפתיMicroturbo TRI 60 .

תמונה 9 – טיל שיוט YA ALI | מקור: איסנ"א
טיל שיוט MOBIN
MOBIN הוא טיל שיוט איראני בעל טווח של 450 ק"מ, שנחשף בפעם הראשונה בשנת 2019. נראה כי תחילה הטיל עושה שימוש בניווט אינרציאלי הנעזר בניווט לווייני, ולאחר מכן בביות אלקטרו-אופטי ומכ"מי גם יחד. אין פרטים נוספים בנושא.

תמונה 10 – טיל שיוט MOBIN | מקור: globalsecurity.org
טילי שיוט NASIR ו-NASR 1
שני טילי השיוט הם טילים ימיים שפותחו על בסיס הטיל הסיני C-704. הטווח שלהם הוא כ-35 ק"מ.
תמונה 12 – טיל שיוט NASR 1 | מקור: MEHR

תמונה 12 – טיל שיוט NASR 1 | מקור: MEHR
טיל שיוט GHADER
GHADER הוא טיל שיוט ימי שפותח על בסיס הטיל הסיני C-802. הטווח שלו 300 ק"מ והוא נושא רש"ק במשקל 200 ק"ג.

תמונה 13 – טיל שיוט GHADER | מקור: MEHR
לוח 1 – השוואת פרמטרים של טילי שיוט איראניים
")
העברת טילי שיוט איראניים לחות'ים בתימן
בשנים האחרונות האיראנים העבירו טילי שיוט לחות'ים בתימן, נוסף על טילי קרקע-קרקע וכטב"מים מתפוצצים. החות'ים קיבלו מאיראן טילי SOUMAR המכונים בשמות שונים, אולי תוך כדי הכנסת שיפורים מקומיים. המוכרים ביותר הם דגמי ה-QUDS השונים. הטבלה להלן מסכמת ומשווה את הפרמטרים העיקריים בארסנל הטילים שברשות החות'ים.
")
סיכום
טילי השיוט מהווים איום משמעותי בגלל המאפיינים המבצעיים הבאים:
- טווחי פעולה גדולים.
- טיסה בגבהים נמוכים תוך התחמקות ממערכות הגילוי.
- רש"קים במשקל גבוה.
- חלקים יכולים לשאת נשק גרעיני.
- חלקם יכולים לבצע את משימתם בצורה שקטה, ללא תקשורת.
- יכולת חמקנות (stealth) בטילי שיוט עתידיים.
- יכולתם של חלק מטילי השיוט לפגוע במדוייק במטרותיהן.
- יכולתם של טילי השיוט להוות תחליף למטוסי תקיפה מאוישים. הדבר נכון לגבי מדינות בעלות חיל אוויר כמו איראן, אבל גם לגבי משטרי טרור כמו החות'ים בתימן, שאין להם חיל אוויר.
על מנת להתמודד בהצלחה עם טילי שיוט יש צורך בנקיטת האמצעים הבאים:
- שיפור היכולת של המודיעין הטכני על מנת להכיר היטב את האיומים ואת הפיתוחים החדשים בתחום.
- חסימת ערוצי הרכש שמאפשרים פיתוח וייצור של טילי שיוט.
- שיפור אמצעי הגילוי תוך מתן עדיפות לגילוי פלטפורמות אוויריות הטסות בגבהים נמוכים, בייחוד מעל הים או תוך כדי ניצול הסתרה על ידי תוואי הקרקע כשטסים מעל היבשה.
- פריסת מערך טילי הגנ"א שיכסה את כל נתיבי החדירה האפשריים לכיוון המדינה ולכיוון אתרים חשובים.
- קיום כוננות מוגברת של מטוסי קרב בעלי יכולת הסתכלות למטה (look down) בזמני מתיחות ביטחונית.
- פיתוח יכולות מודיעיניות על מנת להנחית מכת נגד מקדימה על מצבורים או אתרי שיגור
- פיתוח יכולת הרתעה קטלנית.
נספח – שיטות ניווט והנחיה
נספח זה מסביר בקצרה מונחים המתייחסים לשיטות ניווט והנחיה עיקריות של טילי שיוט.
GNSS – Global Navigation Satellite System – זהו שם כללי למערכות הניווט הלווייניות. המערכות מבוססות על שידור מיקום ונתוני תזמון (timing) מסונכרנים ביניהם. מקלט ה-GNSS שנמצא בפלטפורמה המנווטת מפעיל אלגוריתמים שמחשבים את מיקום ומהירות הפלטפורמה מתוך הנתונים הנ"ל. כיום מופעלות בעולם מספר מערכות GNSS:
GPS – מערכת אמריקאית
GLONASS – מערכת רוסית (סובייטית לשעבר)
GALILEO – מערכת אירופית
BEYDOU – מערכת סינית
IRNSS – מערכת מקומית הודית
QZSS – מערכת מקומית יפנית
ניווט GNSS, ניווט לווייני – ניווט המתבצע באמצעות מערכת ניווט לוויינית. בפלטפורמה המנווטת יש מקלט ניווט לווייני המספק נתוני מיקום למחשב הפלטפורמה. במחשב יש תוכנית ניווט הבנויה לרוב ממספר נקודות ציון דרך (way points) אלגוריתם הניווט משווה את קטע הטיסה האמיתי עם זה של תוכנית הניווט, וההבדלים ביניהם מוזנים כפקודות תיקון לפלטפורמה.
הנחיית GNSS, ביות GNSS – כמו הניווט – רק שהתהליך נמשך עד הפגיעה במטרה.
INS – Inertial Navigation System – מערכת ניווט אינרציאלית מבוססת על חיישנים תלת-ציריים למדידת תאוצה וקצב סיבוב. אלגוריתמים מתאימים מסוגלים להפיק מתוך מדידות אלה נתוני מהירות ומיקום של הפלטפורמה הנושאת. מערכות אלה – למרות יתרונן הגדול שלא ניתן לחסום אותן – נוטות להיסחף (דיוק הניווט יורד עם הזמן, תלוי באיכות החיישנים של המערכת האינרציאלית) ולכן הן נעזרות במערכת ניווט לוויינית על מנת להתגבר על הסחיפות.
TERCOM – Terrain Contour Matching – בפלטפורמה המנווטת יש מד גובה מכ"מי שמודד במדויק את הגובה מעל פני השטח. פרופיל של מספר מדידות משווה את תכסית הקרקע הנמדדת לפרופיל הניווט הרצוי, ומההבדלים ביניהם מופקות פקודות התיקון לפלטפורמה. החיסרון של מערכות אלה – הן ניתנות לגילוי ולחסימה.
DISMAC – Digital Scene Matching Area Correlation – שיטת ניווט המבוססת על השוואת תמונת תוואי הקרקע של מצלמה הנישאת על ידי הפלטפורמה המנווטת למפות המוזנות כחלק מתוכנית המשימה.
ביות מכ"מי – מתבצע באמצעות ראש ביות מכ"מי, שהוא מכ"ם קטן שמסוגל לגלות מטרות על רקע הסביבה – למשל ספינה מתכתית על רקע הים.
ביות אלקטרו-אופטי – מתבצע באמצעות ראש ביות אלקטרו-אופטי – מצלמה משוכללת, לרוב ליום ולילה, המסוגלת לגלות ולזהות מטרות על רקע הסביבה. ברוב המקרים חימושים עם ראש ביות אלקטרו-אופטי נעזרים במפעיל אנושי האחראי על שלב זיהוי המטרה וייזום תקיפתה.
________
[1] אריה אבירם הוא מהנדס אלקטרוניקה, בוגר הפקולטה להנדסת חשמל של הטכניון, מכון טכנולוגי לישראל. שירת בשירות סדיר במערך הבקרה של חיל האוויר כקצין טכני ובשירות מילואים ביחידת שדה. עבד כמהנדס פיתוח, מהנדס מערכת ומנהל פרוייקטים באחד ממפעלי התעשיות הביטחוניות. התמחה בהנדסת מערכת של מערכות מורכבות המשלבות כלי טיס לא מאויישים ובניהול פרוייקטים רחבי היקף. בשנת 1991 קיבל פרס בטחון ישראל על פיתוח מערכת נשק יחודית לח״א.
Photo credit: csis.org