

מערכת לייזר לגילוי עצמים ולמיפוי תלת-ממדי
במה טכנולוגית, 8 בינואר 2026

הלייזר הוא כלי עזר בשדה הלחימה המודרני המשמש כלי נשק, כגון לייזר רב עוצמה, או אמצעי עזר, כגון מציין מטרות ומד מרחק. אחד השימושים הבולטים בלייזר הוא כסוג של חיישן או מעין מכ"ם רגיש לשם גילוי עצמים נעים או במנוחה, וכן מיפוי אזורים בדייקנות רבה, במערכת ששמה LiDAR – Light Detection and Ranging.
מטרת המאמר היא להאיר את הנושא של יישום מערכות לייזר לגילוי עצמים ולמיפוי מדויק של פני שטח, ולהתמקד ביתרונות המובְנים של מערכת ה-LiDAR המבוססת על לייזר, לעומת מערכות המכ"ם הרגילות. נושא זה, הנמצא כיום בחזית הפיתוח הטכנולוגי, הוא בעל חשיבות רבה למדינת ישראל הן בהיבטים אזרחיים שונים והן בהיבטים צבאיים-ביטחוניים, כמפורט בהמשך. מסיבה זו אנו סבורים כי על מדינת ישראל ליזום פיתוח עצמאי ולעודד את התעשיות המקומיות ואת מוסדות האקדמיה הקשורים למחקר ופיתוח בנושאי מערכות LiDAR לפעילות משותפת של פיתוח מערכות אלו למגוון יישומים, בשילוב גורמים מקומיים וגורמי חוץ אמינים. מכיוון שרכיבי ה-LiDAR פגיעים לשיבוש או למתקפות סייבר, עם פוטנציאל לנזק לתשתיות קריטיות כמו מתקני תעשייה וביטחון, יש לשקוד על פיתוח אמצעי הגנה יעילים למערכות אלו.
רקע טכנולוגי
LiDAR, בדומה ל-RADAR, היא מערכת המבוססת על שידור גלים אלקטרומגנטיים (א"מ) וקליטת החזר של גלים אלו מעצמים במרחב. ההבדל בין מערכות אלו נעוץ בסוג המשדר ובאופי הגל המשודר, כפי שמסוכם בטבלה הבאה:

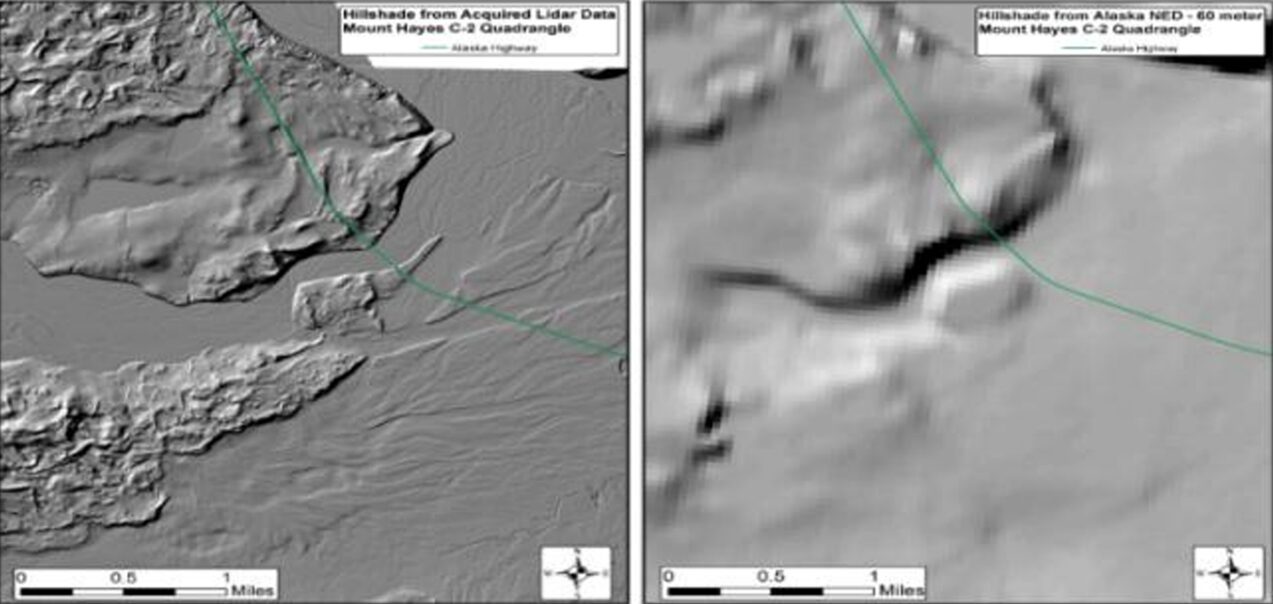
עקרון הפעולה של טכנולוגיית מיפוי שטח באמצעות ה-LiDAR מבוסס על סריקת שטח נתון על ידי לייזר או מקור אחר של גלים אלקטרומגנטיים קוהרנטיים, ומדידת הזמן הנדרש לפולס של לייזר להגיע אל מטרה מסוימת וחזרה ממנה למקור השולח. זמן זה נקרא זמן המעוף –Time of Flight . מידיעת שני פרמטרים קריטיים – הזמן הנמדד ומהירות האור הקבועה – ניתן לחשב את המרחק מהעצם השולח אל הנקודה המסוימת, ובעיבוד ממוחשב של הקרן המוחזרת ניתן לחלץ פרמטרים אופייניים של הקרן כגון אמפליטודה ופאזה, ולקבל תמונה תלת-ממדית של האזור שנסרק. תהליך זה נעשה בדרך כלל באמצעות הפעלת לייזר בתדרים של מגה-הרץ (מיליוני פולסים בשנייה), כך שניתן לקבל תמונה תלת-ממדית של שטח נרחב שנמדד בתצורה של ענן נקודות –Point Cloud . תהליך גילוי האות המוחזר נעשה בשיטת הדמיה פעילה – Active Imaging – קרי הפעלת הגלאי אחרי פרק זמן שנקבע מראש כדי לקלוט אך ורק מידע רלוונטי שמוחזר מהמטרה, ולא אותות או רעש אופטי שמפוזר באופן אקראי מהמטרה.
לאורכי הגל הקצרים של מערכת ה-LiDAR, לעומת אורכי הגל הארוכים של מערכת ה-RADAR, יש יתרונות מלבד הדיוק בגילוי פרטים מפורטים (רזולוציה):
- מערכת פשוטה, קומפקטית ומודולרית.
- תחזוקת המערכת פשוטה יחסית.
- עלות נמוכה עקב שימוש ברכיבים שהם סטנדרטיים בתעשיית האופטיקה, הפוטוניקה והטלקומוניקציה.
- החזרה רבה יותר של קרן הלייזר מהמטרה: ההחזרה גוברת ככל שאורכי הגל קצרים יותר.
- דיוק רב במדידת מרחקים וכושר הפרדה גבוה, דבר המאפשר יצירת תמונת שטח תלת-ממדית מדויקת בזמן אמיתי.
- מיקוד טוב יותר (מזה של מערכות RADAR) של הקרן על המטרה, מכיוון שהתבדרות קרן נמוכה יותר ככל שאורך הגל קצר יותר.
- הגלאים בתחומי אורכי גל קצרים הם יעילים, רגישים, זולים וזמינים.
מבנה מערכת LiDAR
מערכת LiDAR למיפוי תלת-ממדי מורכבת מהרכיבים הבאים:
- מערכת לייזר המופעלת באופן רציף או פולסי, בעלת קוהרנטיות גבוהה, כתלות ביישום האזרחי או בדרישה המבצעית הצבאית.
- מערכות לאספקת אנרגיה למערכת הלייזר, לגלאים ולמערכות המחשוב ועיבוד הנתונים.
- מערכת אופטו-מכנית (מבוססת על רכיבים מכניים נעים) או מיתוג אלקטרוני להכוונת קרן לייזר, לשם סריקה מרחבית של המטרה ושמירה על יציבות מרחבית בעזרת GPS או מערכות ניווט גלובליות אחרות, וכן קליטה יעילה של האור המוחזר.
- מערכת גילוי האות המוחזר: מערכת אקטיבית שבה הגלאי קולט אותות מוחזרים בחלונות זמן קבועים מראש, או מערכת פסיבית שבה הגלאי קולט אותות מוחזרים ברציפות.
- מערכת ממוחשבת לעיבוד נתונים, סינון רעשי רקע ויצירת תמונת שטח על סמך האותות שנאספו – 3D point cloud representation.
- מערכת שליטה, בקרה וסנכרון של רכיבי ה-LiDAR השונים.
- מערכת להצגת נתונים מעובדים וממשק משתמש.
תיאור סכמתי של מערכת LiDAR בסיסית:
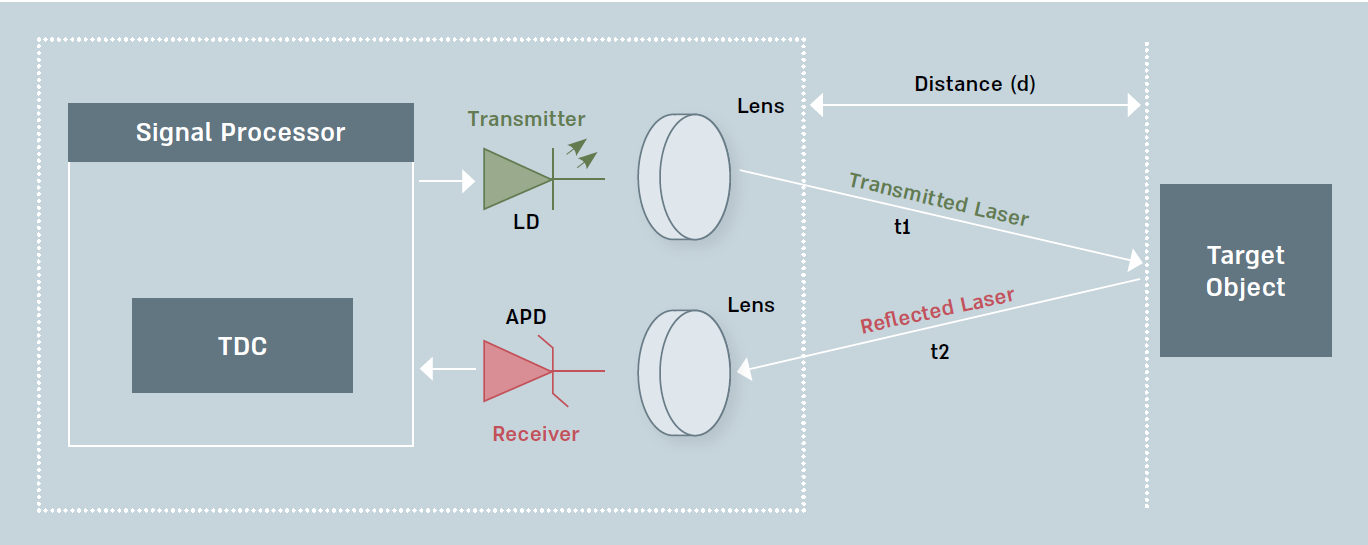
מקרא:
- LD מציין את משדר הלייזר
- APD – גלאי עבור הקרינה החוזרת
- TDC ו-signal processor הם יחידת העיבוד הדיגיטלית של אותות הלייזר שנשלחים אל המטרה – transmitted – והאותות המוחזרים ממנה –reflected.
שיטות גילוי של מערכות LiDAR
קיימות שלוש שיטות גילוי עיקריות:
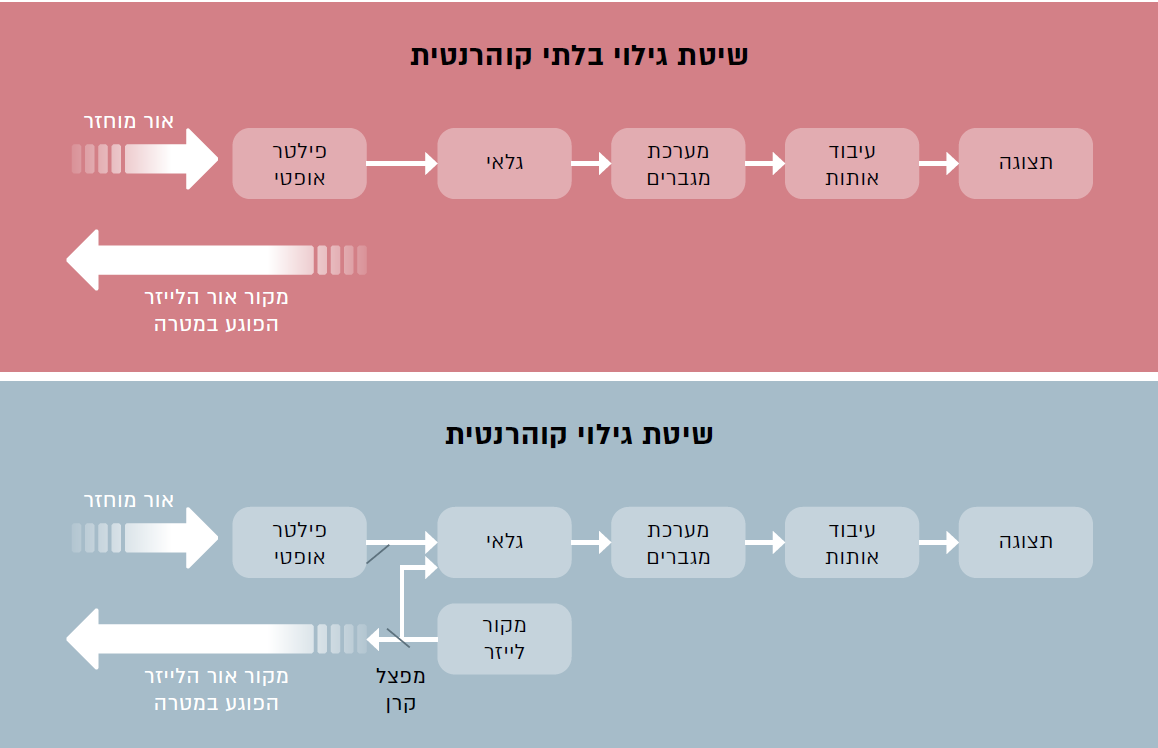
- שיטה בלתי קוהרנטית – האור המוחזר מהמטרה נאסף ישירות לגלאי, לפענוח ולבניית מיפוי. מדובר בשיטה פשוטה יחסית עם פוטנציאל לטעויות, עקב קליטת אור מפוזר מהמטרה בזוויות רבות ושונות ביחס לקרן הלייזר הפוגעת במטרה (החזרה דיפוזיבית), והדבר עלול ליצור תמונת משטח או תמונת מטרה מעוותת ועמומה.
- שיטה קוהרנטית – האור המוחזר מהמטרה וחלק מאור הלייזר (קרן ייחוס) שנשלח מלכתחילה אל המטרה נאספים על ידי גלאי או מערכת גלאים, לשם השוואה בין תכונות האור לפני הפגיעה במטרה לבין תכונותיו לאחר הפגיעה. השוואה זו נותנת תמונת משטח מדויקת יותר. להלן תיאור סכמתי של מערכות אלו.
תמונה 3 – שלבים בהצטיידות איראן במערכות הגנ"א
3. שיטת גילוי באמצעות LiDAR קוונטי
רקע כללי
מערכת של LiDAR קוונטי מבוססת על מדידות הארת המטרה הנבדקת באמצעות חלקיקי היסוד של האור – הפוטונים, שהם בעלי תכונות מיוחדות. הדבר נקרא הארה קוונטית (Quantum Illumination). במצב זה מיישמים תופעות קוונטיות ייחודיות של חלקיקים ברמה אטומית או תת-אטומית, לדוגמה הפוטונים. נמצא כי יישום של תכונות קוונטיות במערכות LiDAR מקנה לשיטה זו יתרונות נוספים בהשוואה למכ"ם המבוסס על התורה האלקטרומגנטית הקלאסית, דבר הבא לידי ביטוי בהגברת רגישות ודיוק המדידה מבחינת היכולת להבחין בעצמים בעלי ממדים קטנים, ואומדן מדויק יותר של מרחקים וממדים.
גילוי באמצעות שזירות
שיטת הגילוי באמצעות LiDAR קוונטי היא שיפור משמעותי של השיטה הקוהרנטית, תוך יישום עקרון השזירוּת (Entanglement) על חלקיקים קוונטיים כגון חלקיקי היסוד המרכיבים את האור והקרינה האלקטרומגנטית, דהיינו הפוטונים. מצב שזור בין חלקיקים קוונטים הוא מצב מיוחד שבו לשני חלקיקים קוונטיים או יותר יש תכונות משותפות, ומדידת אחת התכונות משפיעה, באופן מיידי וללא תלות במרחק בין החלקיקים, על החלקיק השני. חשוב להדגיש כי ההשפעה היא מיידית גם אם שני החלקיקים נמצאים במרחק אינסופי זה מזה. בעיקרון ניתן לייצר בשיטות פיזיקליות שונות ומורכבות זוגות פוטונים שזורים, אשר משוגרים בו-זמנית אל המטרה ואל הגלאי; כל שינוי בגל המוחזר יבוא לידי ביטוי גם בגל הייחוס, ועל ידי כך מקבלים אות מוגבר.
גילוי באמצעות התאבכות קוונטית (קורלציה או אינטרפרומטריה קוונטית)
בשיטה זו מודדים באמצעות קרן לייזר בעלת קוהרנטיות גבוהה את הפרשי הזמנים (כלומר הפרשי הפאזה של הגלים הא"מ) בין אלומות הלייזר המוחזרות מהמטרה. הפרשי הזמנים מתורגמים להפרשי מרחקים, שנותנים לרוב תמונה מדויקת של המטרה הנבדקת. לשיטה זו מגרעת בסיסית שנובעת מהשפעת גורמים אטמוספריים, כגון הפרשי טמפרטורה והנחתת עוצמת הקרן, על התוצאה המבוקשת.
גילוי באמצעות מצבים דחוסים
שיטה זו היא שיפור של שיטת הגילוי באמצעות התאבכות קוונטית. טכנולוגיה זו – מבלי להיכנס לפרטים פיזיקליים – מיישמת את העובדה שניתן להפחית את רעש הרקע של גודל מדיד מסוים המאפיין חלקיקים קוונטיים, כולל חלקיקי האור (פוטונים), ועל ידי כך להגביר בסדר גודל את רגישות המדידה של גודל זה גם כאשר האות המוחזר חלש ביותר. מצבים מיוחדים אלו נקראים מצבים דחוסים (Squeezed States). כך למשל ניתן לתרגם ואף להגביר ברמת דיוק של סנטימטרים אחדים את ממדי המרחק או ממדי הגובה, וזאת מתוך מדידת הפרשי זמנים מזעריים בין הקרן הפוגעת לקרן המוחזרת עקב שינויים של המשטח הנבדק (בעגה המקצועית – מדידת הפאזה של הגל הא"מ), ועל ידי כך לקבל תמונת פני שטח ברמת דיוק גבוהה ביותר.
באופן כללי חשוב לציין כי מערכות ה-LiDAR הנוכחיות משלבות מערכות לייזר חדשניות וקומפקטיות במגוון אורכי גל עם מערכות מהירות לסריקה וגילוי המבוססות על התקני מצב מוצק, מה שמקטין את גודל המערכת ואת צריכת האנרגיה שלה ומגביר את יעילותה הכוללת של המערכת. שיפור נוסף וחדשני הוא הוספת ממד הגובה לממד המרחבי והמהירות – 4D imaging – שנותן תמונה מדויקת ועדכנית של פני השטח והסביבה, תוך זיהוי עצמים ברזולוציה גבוהה על ידי יישום, עיבוד והצגת נתונים בתצורת ענן נקודות (Point Cloud).
יישומים של מערכות LiDAR
מלבד יכולות המיפוי התלת-ממדי וקבלת מידע טופוגרפי מדויק, שבהן דן מאמר זה, חשוב לציין יישומים של מערכות LiDAR בתחומים רבים נוספים:
יישומים אזרחיים:
- תעשיית כלי הרכב האוטונומיים: המערכת מאפשרת זיהוי אובייקטים בזמן אמת וניווט בטוח בסביבות נהיגה דינמיות.
- שילוב מערכת LiDAR במערכות תחבורה שונות: הטכנולוגיה משולבת ברחפנים, ברכבות ובמערכות תחבורה של שדות תעופה לטובת זיהוי אובייקטים וניווט בטוח יותר על ידי ראייה תלת-ממדית.
- ניטור תשתיות: המערכת משמשת לפיקוח ולהערכת המצב של קווי צנרת, קווי חשמל ורשתות רכבת, לצורך זיהוי מוקדם של חולשות מבניות ומפגעים סביבתיים.
- שילוב LiDAR בתעשיית הרובוטיקה: שילוב בתעשיות שונות כגון תעשיית הרכב, ניווט מורכב, ייצור שבבים וייצור רכיבים אלקטרו-אופטיים מורכבים.
- יישומי חקלאות: ניתוח שטחים שמתאימים לחקלאות; ניהול כלכלת גידולים על ידי מעקב אחר איכות גידולים או נזקים פוטנציאליים לגידולי חקלאות בשטחים נרחבים.
תכנון עירוני: מתכנני ערים משלבים את המערכת עם בינה מלאכותית ויכולות ליצירת מודלים תלת-ממדיים על מנת לבנות "ערים בטוחות", שיאפשרו מעקב בזמן אמת על תאונות וסכנות ביטחוניות בצורה מהירה ויעילה ויסייעו בניהול התנועה. המערכת עוזרת גם בייעול השירותים העירוניים, כמו ניהול הפסולת וחלוקת האנרגיה ומעקב והקצאת משאבים עבור תשתיות רלוונטיות לנושאים אלו.
יישומים צבאיים-ביטחוניים:
- מיפוי של שדה הקרב: המערכת מאפשרת לבצע ניתוח מדויק ומיפוי תלת-ממדי בזמן אמת של פני השטח, גם בסביבות עירוניות.
- איתור האויב: המערכת עוזרת לאתר במדויק עמדות ותשתיות של האויב.
- כלי רכב או כלי טיס אוטונומי, רובוטיקה וניווט: המערכת מספקת מידע מפורט על הסביבה המרחבית, זיהוי מכשולים, גילוי רחפנים או כטב"מים, ומשפרת את יכולות התנועה והניווט גם בסביבות מורכבות ועוינות.
- גילוי מוקשים תת-ימיים: המערכת מודדת את העומק שבו נמצאים המוקשים.
- הערכת נזקי קרב (BDA – Battle Damage Assessment) בזמן אמיתי.
- זיהוי כימיקלים מסוכנים (לוחמה כימית): באמצעות מכשיריLiDAR ניתן לאתר נוכחות של גזים שונים ולזהות את סוג הגז וריכוזו, כולל גזים רעילים שמשתמשים בהם כחלק מלוחמה כימית. המכשיר שולח לייזר באורכי גל המתאימים לקווי הבליעה של החומר ומודד את כמות האור שנבלעה, ומנתון זה ניתן לקבל מידע על החומר הנבדק וריכוזו.
- תמיכה בנשק לייזר: מערכת LiDAR מנבאת את הביצועים של מערכת נשק הלייזר על ידי ניתוח תנאים ותהליכים אטמוספריים ותנאים סביבתיים שונים, ואף מאפשרת לזהות מסלולי תעופה של טילים.
- הגנות והגנה מרחוק: מערכות אלקטרוניות ואלקטרו-אופטיות נוספות שונות מאפשרות איתור מתקפות על תשתיות חיוניות או מתקפות מעבר לגבול, איתור פרצות אבטחה או קווי הגנה, ועל ידי כך מאפשרות אופטימיזציה של אמצעי הגנה.
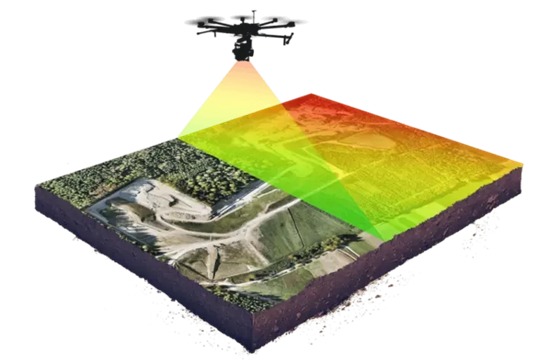
- יכולות מעקב וסיור מגובה רב: מערכות כמו HALOE של DARPA ממפות שטחים גדולים ויוצרות יכולת איסוף נתונים מתקדמת מגובה של יותר מ‑30 קילומטרים מעל פני השטח. בתמונה להלן הדגמה סכמתית של מיפוי תלת-ממדי של שטחים גדולים על ידי מערכת LiDAR על גבי רחפן.
מקור: הסבר על טכנולוגיית LiDAR
חברות מובילות בתחום ה-LiDAR
פעילותן של החברות המובילות בתחומי ה-LiDAR נגזרת מהיישומים בתחומים האזרחיים והצבאיים-ביטחוניים כפי שפורטו לעיל. במספר חברות היישומים בתחום האזרחי והצבאי-ביטחוני משולבים זה בזה. בסקירה להלן מספר מצומצם של חברות עיקריות המובילות בתחום בארצות הברית, סין ורוסיה וגרמניה:
Velodyne LiDAR: אחת מהחברות הראשיות והוותיקות בארצות הברית בתחום יישומי לייזר למדידות מרחקים. בשנת 2016 הפכה לחברה שמפתחת מערכות LiDAR בתחום כלי רכב אוטונומיים, תעופה, מיפוי, רובוטיקה והכנת תשתיות דיגיטליות כחלק מתשתית של עיר חכמה.
Ouster: החברה מתמחה בייצור חיישנים עבור מערכותLiDAR , ובפרט פתרונות לסביבות תעשייתיות. התמזגה עם Velodyne LiDAR בשנת 2023.
נציין כי החברות Velodyne Lidar ו-Ouster מפתחות גם יישומים צבאיים. החברות מספקות חיישני LiDAR לזיהוי ומעקב אחר מטרות או תנועות צבאיות ומיפוי אזורי לחימה, רובוטיקה ואמצעי ניווט עבור כלי טיס או רכבי סיור לא מאוישים. החברות מפתחות במשותף חיישנים מתוחכמים בעלי עמידות גבוהה ובסטנדרטים צבאיים.
Aeva Technololgies, Inc : נוסדה בשנת 2016 בארצות הברית. תחום ההתמחות של החברה הוא פיתוח טכנולוגיות של LiDAR המבוססות על מזעור מערכות ועל קידוד קרן הלייזר באמצעות אפנון תדרים לשם הגברת רגישות הגילוי, ופיתוח מערכות הקשורות לטכנולוגיה זו כגון סנסורים, תוכנות ייעודיות עבור כלי רכב אוטונומיים, מערכות אוטומציה לתעשייה ומערכות אוטונומיות לבדיקות מעבדתיות הקשורות לתעשייה – מטרולוגיה.
Hesai Technology ו-RoboSense: חברות סיניות מתחרות בעלות מוצרים דומים, נוסדו בשנת 2014. תחומי התמחותן הם פיתוח מערכות LiDAR וסנסורים עבור כלי רכב אוטונומיים, רובוטיקה ומערכות תעשייה. לגבי חברתHesai Technology הועלו חשדות לפיתוחים באוריינטציה צבאית (מפורט בהמשך).
China South Industries Group Corporation: התאגיד הסיני פיתח רובוט בעל ארבע רגליים, המדמה זאב שמשתמש בחיישני LiDAR על מנת לסרוק את הסביבה. הזאבים הרובוטים המיועדים לסייע לחיילי צבא סין בשדה הקרב מסוגלים להתנייד בתנאי שטח קשים, לשאת נשק, לירות באופן מדויק ולהתנהל כלהקה מתואמת.
AGM Systems: חברה רוסית המצהירה שהיא מפעילה מל"טים ורחפנים המצוידים בחיישני LiDAR לצורך מיפוי תלת-ממדי במגוון יישומים אזרחיים, בהם תשתיות, מיפוי מקרקעין, יערנות וכרייה. החברה פעילה במאמץ המלחמתי הרוסי במלחמה באוקראינה, ככל הנראה לצורך מיפוי שדה הקרב באמצעות מל"טים, ועל כן משרד האוצר האמריקאי הטיל עליה סנקציות.
Blickfeld GmbH: חברה גרמנית, הוקמה בשנת 2017. תחומי פעילותה מתמקדים בפיתוחי רכיבי חומרה ותוכנה למערכות LiDAR לתחומי התחבורה החכמה, כלי רכב אוטונומיים ואוטומציה בתעשייה.
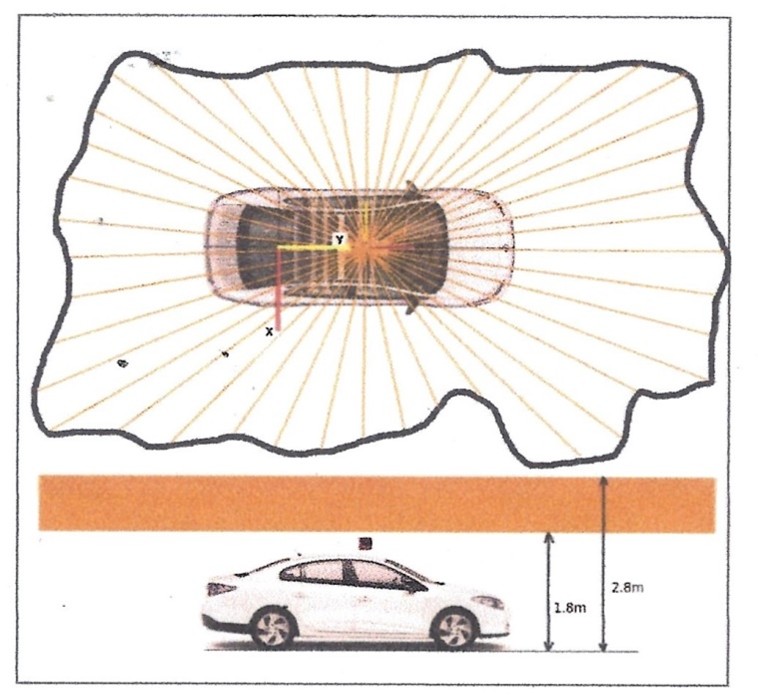
דוגמה לסריקה מרחבית שמתבצעת ברכב אוטונומי על ידי מערכת LiDAR מתוצרת חברת Velodyne LiDARמוצגת בתמונה הבאה:
פיתוחים עתידיים
במהלך השנים הקרובות צפויים שיפורים בטכנולוגיות LiDAR כמפורט בטבלה:
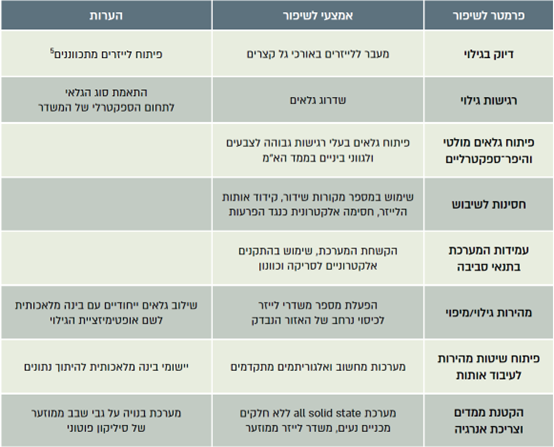
לסיכום סעיף זה: ניתן לשדרג את הדיוק, את רגישות הגילוי, את העמידות בתנאי סביבה קשים ואת היכולת של מערכות לגלות איומים במהירות גבוהה. שילוב בינה מלאכותית (AI) במערכות LiDAR יאפשר ניתוח מתוחכם יותר של נתוני שטח ומרחב בזמן אמת.
השלכות עבור מדינת ישראל
פוטנציאל לפיתוח מערכות LiDAR:
במדינת ישראל קיימת תשתית טכנולוגית נרחבת, כולל כוח אדם מיומן ומכוני מחקר, המאפשרים ייצור מערכות LiDAR מתקדמות. תשתית זו מאפשרת למדינת ישראל להוביל מאמץ ממוקד בפיתוח מערכות אלו ליישומים שונים, הן בהיבט האזרחי והן בהיבט הצבאי-ביטחוני – פיתוח מערכות הדמיה לשדה הקרב העתידי עם כושר הפרדה גבוה בהשוואה למכ"ם הרגיל, ויישומים ביטחוניים אחרים כמפורט לעיל. התחומים הרלוונטיים המהווים את אבני היסוד של מערכות LiDAR הם בין היתר אופטיקה, לייזרים, אופטו-מכניקה, גלאים, תכנון וייצור שבבים, אופטיקה קוונטית, פיתוחי תוכנה ולוחמת סייבר, אלקטרוניקה ועיבוד אותות. הצגה סכמתית של נושאים אלו בתמונה להלן:

כך למשל, מערכת ניהול תחבורה של Innoviz, חברה ישראלית מובילה עולמית בתחומה; דוגמה לפעילותה מוצגת בתמונה להלן:

מכאן נגזרת היכולת לפיתוח מערכות LiDAR ממוזערות ובעלות דיוק רב ליישומים נוספים, ועל גבי פלטפורמות שונות. היכולות הטכנולוגיות המוכחות של ישראל מאפשרות לה שיתוף פעולה עם תעשיות מקבילות ומובילות באירופה ובארצות הברית, תוך ניצול היתרון היחסי של ישראל בנושאים שנסקרו לעיל. אבל חשוב לזכור כי בכל שיתוף פעולה בפיתוח מערכות LiDAR גלומים סיכונים רבים, והדרך העדיפה היא פיתוח עצמאי ללא תלות בגורמים זרים, מהסיבות הבאות:
פיתוח מקומי של אמצעי הגנה יעילים למערכות אלו: מהם הסיכונים? מערכות בקרה ומיפוי המבוססות על LiDAR בהיבטים האזרחיים והצבאיים-ביטחוניים מורכבות בדרך כלל מרכיבי חומרה ותוכנה כגון:
- אמצעי שידור וקליטת נתונים.
- תוכנה ייעודית לבקרה ולעיבוד נתונים.
- שמירת נתונים בענן או באמצעי אחסון מקומיים.
- תקשורת, בדרך כלל אלחוטית, בין רשת של מערכות LiDAR שונות.
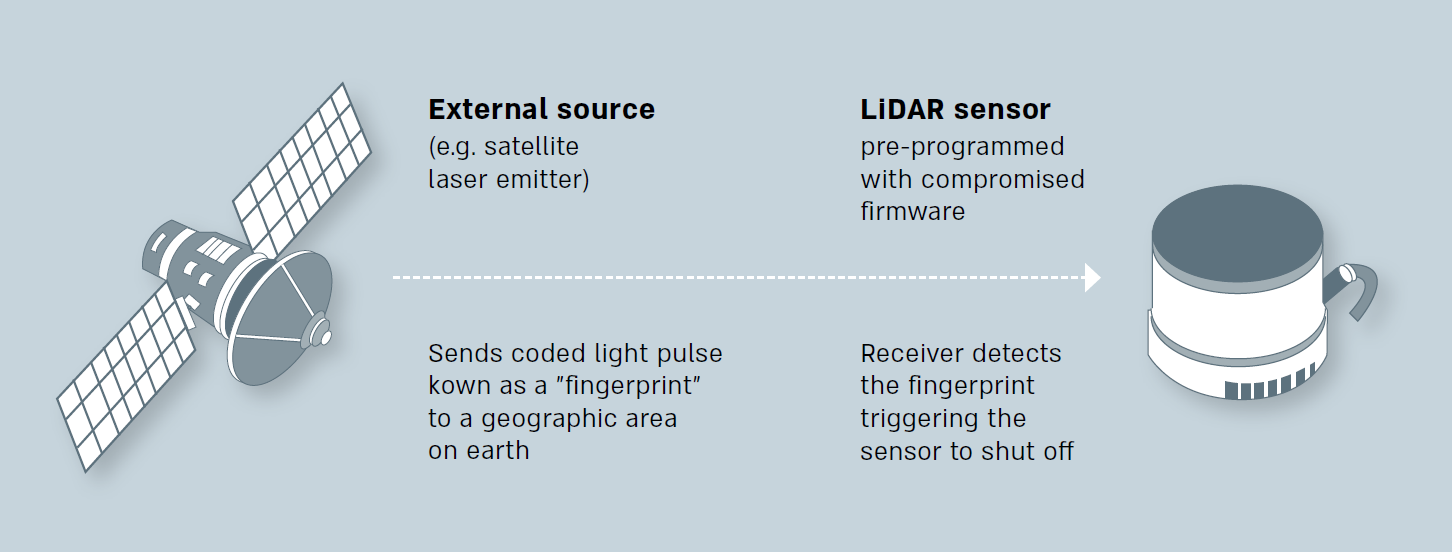
רכיבים אלו פגיעים לשיבוש ולמתקפות סייבר באמצעות שליחת אותות אופטיים שגויים או פולסים חשמליים רבי עוצמה, שיבוש פעולת תוכנת ההפעלה ומערכות עיבוד הנתונים, וכן לדליפת נתונים חיוניים לגורמים עוינים. פגיעה או שיבוש התפקוד של אחד מרכיבים אלו עלולים לגרום נזק לשירותים עירוניים חיוניים, לתשתיות, לתחבורה, למתקני תעשייה ואוטומציה ולנזק ביטחוני רב. להלן הדגמה סכמתית של אפשרות תקיפה על ידי שיגור אות אופטי שגוי מהחלל למערכת הגלאים של ה‑LiDAR :
מניעת שתילת שבבים ותוכנות לשידור נתונים: פיתוח מקומי ועצמאי ככל האפשר, על מנת למנוע השתלת שבבים זעירים או תוכנות זדוניות שלא ניתן לגלותן, ואשר מטרתן היא צילום אתרים חיוניים ושליחת נתונים מתוך מאגרי הנתונים שאוספות מערכות LiDAR.
בקרה על שרשרת האספקה של רכיבים קריטיים: כדי להימנע ממחסור ברכיבים קריטיים עבור מערכות LiDAR, על המערכת הממשלתית לדאוג לשרשרת אספקה אמינה כדי למנוע מחסור ברכיבים קריטיים למערכות אלו, כגון מינרלים או עפרות נדירות.
לסיכום, על מדינת ישראל ליזום פיתוח עצמאי ולעודד את התעשיות המקומיות ואת מוסדות האקדמיה הקשורים למחקר ופיתוח בנושא מערכות LiDAR לפעילות משותפת בנושא (בהיבטים אזרחיים וצבאיים-ביטחוניים) עם גורמים מקומיים וגורמי חוץ אמינים, וזאת על ידי עידוד שיתופי פעולה ותמיכה ממשלתית נדיבה כדי לספק הגנה מיטבית למערכות ה-LiDAR תוצרת כחול-לבן.
________
[1] אנה סוקולנקו מתמחה בנושאי ביטחון.
[2] אייקי חזן – מתמחה בנושאי אסטרטגיה וקבלת החלטות, אוניברסיטת רייכמן, הרצליה
[3] אורך גל מוגדר כמרחק בין שני שיאים סמוכים של הגל.
[4] גל א"מ נע במהירות האור, שהיא 300 אלף ק"מ בשנייה בקירוב.
[5] ניתן להפיק ממערכת לייזר מתכוונן מספר אורכי גל, או בלשון אחרת – מספר "צבעים".
Photo made with AI